1. 什么是约束优化
约束优化(Constrained Optimization),也称为限制优化,是指在对一组决策变量施加限制条件的前提下,对目标函数进行最大化或最小化的过程。
在实际问题中,我们往往不能无限制地调整变量,而是需要满足某些硬性约束。例如,预算有限、资源有限、物理边界限制等。这类问题广泛存在于工程设计、经济建模、机器学习、物流调度等多个领域。
2. 约束优化问题的构成
一个典型的约束优化问题通常由以下三部分组成:
- 目标函数(Objective Function):需要优化的函数,比如最小化成本或最大化收益
- 等式约束(Equality Constraints):某些变量必须严格满足的等式条件
- 不等式约束(Inequality Constraints):某些变量必须满足的不小于或不大于某值的条件
例如,一个通用的最小化问题可表示为:
$$ \begin{array}{rll} \mathrm{min} & f(\mathbf{x}) \ \mathrm{s.t.} & g_{i}(\mathbf{x}) = c_{i} & \text{for } i=1,\ldots,n, \text{(等式约束)} \ & h_{j}(\mathbf{x}) \geq d_{j} & \text{for } j=1,\ldots,m, \text{(不等式约束)} \end{array} $$
其中:
- $\mathbf{x}$ 是决策变量向量
- $f(\mathbf{x})$ 是目标函数
- $g_i(\mathbf{x})$ 和 $h_j(\mathbf{x})$ 是约束函数
如果目标函数是最大化问题,可以通过取负数转化为最小化问题:
$$ \mathrm{max}, f(\mathbf{x}) \quad \equiv \quad \mathrm{min}, -f(\mathbf{x}) $$
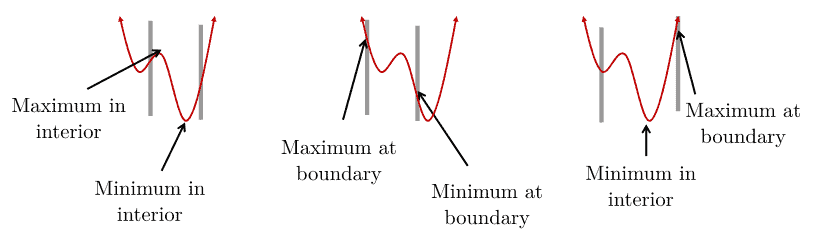
2.1. 极值点的位置
对于非线性函数,极值点可能出现在边界上,也可能出现在内部区域中:
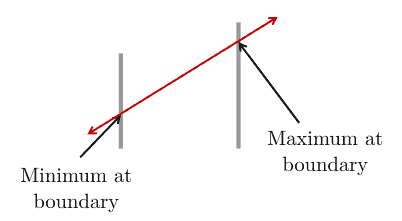
而线性函数的极值点只可能出现在边界上:
3. 约束优化问题的分类
根据目标函数和约束函数的性质,约束优化问题主要分为以下几类:
3.1. 线性规划(Linear Programming, LP)
目标函数和所有约束均为线性函数。例如:
$$ \begin{array}{rl} \mathrm{min} & x_1 + 2x_2 + 3x_3 \ \mathrm{s.t.} & 3x_1 + x_2 \geq 6 \ & 7x_1 - 2x_2 \geq 1 \ & x_1, x_2 \in \mathbb{R}_+ \end{array} $$
- 若所有变量为整数 → 整数线性规划(ILP)
- 若部分变量为整数 → 混合整数线性规划(MILP)
3.2. 非线性规划(Nonlinear Programming, NLP)
目标函数或部分约束为非线性函数。例如:
$$ \begin{array}{rl} \mathrm{min} & x_1 + 2x_2 + 3x_3 \ \mathrm{s.t.} & 3x_1x_2 \geq 6 \ & 7x_1 - 2x_2 \geq 1 \ & x_1, x_2 \in \mathbb{R}_+ \end{array} $$
同样可扩展为 INLP(整数非线性规划)或 MINLP(混合整数非线性规划)。
3.3. 二次规划(Quadratic Programming, QP)
目标函数为二次函数,约束为线性函数。例如:
$$ \begin{array}{rl} \mathrm{min} & x_1 + 2x_1x_2 + 3x_2x_3 \ \mathrm{s.t.} & 3x_1 + x_2 \geq 6 \ & 7x_1 - 2x_2 \geq 1 \ & x_1, x_2 \in \mathbb{R}_+ \end{array} $$
也存在 IQP(整数二次规划)和 MIQP(混合整数二次规划)。
4. 实际应用示例
我们来看一个简单的实际问题:在给定周长的前提下,最大化矩形面积。
设矩形的长为 $x$,宽为 $y$,周长为 $p$,则面积为 $A = xy$,周长为 $2(x + y) = p$。
该问题可建模为:
$$ \begin{array}{rl} \mathrm{max} & A = xy \ \mathrm{s.t.} & 2(x + y) = p \end{array} $$
目标函数为二次函数,约束为线性等式,因此这是一个典型的 QP 问题。
5. 求解方法
5.1. 数学方法
| 方法 | 优点 | 缺点 |
|---|---|---|
| 替换法(Substitution) | 简单直观,适合等式约束 | 对非线性或不连续问题效果差 |
| 拉格朗日乘子法(Lagrange Multiplier) | 可处理复杂等式和不等式约束 | 不等式需额外处理,仅适用于小规模问题 |
| 分支定界法(Branch-and-Bound) | 复杂度较低 | 计算耗时,难以并行 |
| 单纯形法(Simplex) | 内存效率高、迭代快 | 不适合大规模问题 |
| 内点法(Interior Point) | 收敛快,易于并行 | 不适合需要快速求解的退化问题 |
| KKT 条件(Karush–Kuhn–Tucker) | 检查解的最优性 | 对非凸函数不充分 |
| 椭球法(Ellipsoid) | LP 可多项式时间求解 | 数值不稳定、性能差 |
⚠️ 注意:这些方法多为精确算法,能保证找到最优解,但计算开销大;若对精度要求不高,可使用启发式算法(如灰狼优化算法)快速求解近似解。
5.2. 替换法示例
以最大化 $f(x,y) = xy$,约束为 $x + y = 2$ 为例:
$$ \text{由约束得 } y = 2 - x \Rightarrow f(x) = x(2 - x) = 2x - x^2 $$
对 $f(x)$ 求导:
$$ f'(x) = 0 \Rightarrow 2 - 2x = 0 \Rightarrow x = 1 \Rightarrow y = 1 $$
最终最大值为 $f(x, y) = 1$
5.3. 优化求解器工具
| 求解器 | 支持接口 | 特点 |
|---|---|---|
| CPLEX | C++, Java, Python 等 | 通用性强,支持 LP、ILP、MILP、QP 等 |
| Gurobi | C++, Java, Python 等 | 高性能,支持多种混合整数问题 |
| lp_solve | Python, MATLAB 等 | 轻量级,适合 MILP |
| SCIP | C++, Java, Python 等 | 开源,适合 MIP |
| MATLAB Optim. Toolbox | MATLAB | 集成好,适合科研 |
这些工具通常结合了精确算法(如单纯形法)和启发式算法(如分支切割法),以兼顾求解速度和精度。
6. 总结
约束优化是数学建模与工程优化中的核心内容。它涵盖了从线性规划到非线性规划等多种形式,适用于资源分配、调度、设计优化等多个领域。
选择合适的求解方法取决于问题类型、规模和精度要求。对于小规模问题,可使用拉格朗日乘子法或替换法手动求解;对于大规模问题,建议使用 CPLEX、Gurobi 等专业求解器工具。
✅ 建议:掌握基本数学方法,熟悉至少一个优化库(如 Gurobi 或 CPLEX),有助于在实际项目中快速建模求解。
⚠️ 注意:非凸问题可能无法找到全局最优解,需结合问题特性判断是否接受局部最优。