1. 概述
优化算法在计算机科学中有着广泛的应用,其中蝗虫优化算法(Grasshopper Optimization Algorithm,GOA)是一种新兴的群体智能优化方法。它通过模拟自然界中蝗虫群体的行为来寻找问题的最优解。
本文将介绍 GOA 的基本原理、数学模型、实现步骤,并通过一个数值示例展示其求解过程。最后我们还会总结其优缺点,帮助读者全面理解这一算法。
2. 什么是蝗虫优化算法?
GOA 是一种基于群体的元启发式算法,由 Saremi 和 Mirjalili 于 2017 年提出,用于解决数值优化问题。它的灵感来源于自然界中蝗虫群体的社交行为和觅食方式。
该算法通过模拟蝗虫之间的相互作用、风向影响和重力作用,来更新每个“解”的位置,从而在搜索空间中逐步逼近最优解。
3. 蝗虫的行为特征
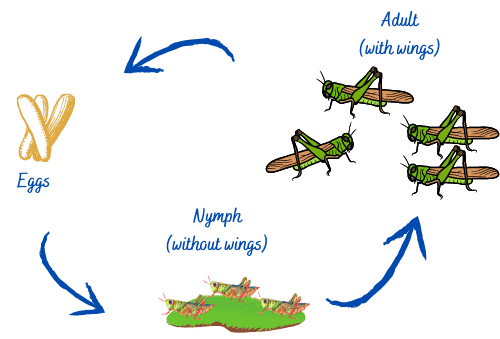
蝗虫生命周期包括三个阶段:卵、若虫和成虫。
- 卵阶段:夏季在植物附近产卵,冬季进入休眠,春季孵化
- 若虫阶段:没有翅膀,移动缓慢,逐步发育成成虫
- 成虫阶段:拥有翅膀,可进行远距离飞行和快速移动
在算法中,我们主要关注的是成虫阶段的快速移动和群体行为,这是 GOA 的核心灵感来源。
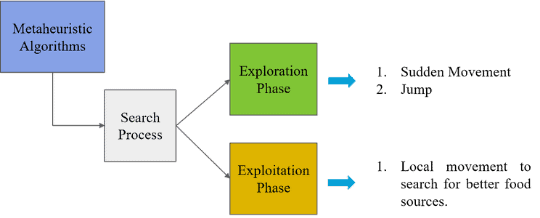
蝗虫群体觅食行为分为两个阶段:
- 探索阶段(Exploration):广泛搜索食物来源
- 开发阶段(Exploitation):在已知食物源附近精细搜索
这两个阶段的平衡是 GOA 算法设计的关键。
4. GOA 的数学模型
GOA 算法模拟了蝗虫的三种行为力:社交互动、重力和风向影响。每个蝗虫的位置由以下公式计算:
(1)
$$
X_i = S_i + G_i + A_i
$$
其中:
- $ S_i $:与其他蝗虫的社交互动
- $ G_i $:重力影响
- $ A_i $:风向影响
在实际实现中,为增加随机性,加入随机系数:
(2)
$$
X_i = r_1 S_i + r_2 G_i + r_3 A_i
$$
其中 $ r_1, r_2, r_3 \in [0,1] $
4.1 社交互动力
社交互动是 GOA 的核心部分,表示为:
(3)
$$
S_i = \sum_{j=1}^{N} s(d_{ij}) \hat{d_{ij}}, \quad i \neq j
$$
其中 $ d_{ij} = |x_j - x_i| $ 是蝗虫之间的距离,$ \hat{d_{ij}} = \frac{x_j - x_i}{d_{ij}} $ 是单位向量。
函数 $ s(r) $ 表示吸引力和排斥力的强度:
(4)
$$
s(r) = f e^{-r/l} - e^{-r}
$$
其中:
- $ f $:吸引力强度
- $ l $:吸引力长度尺度
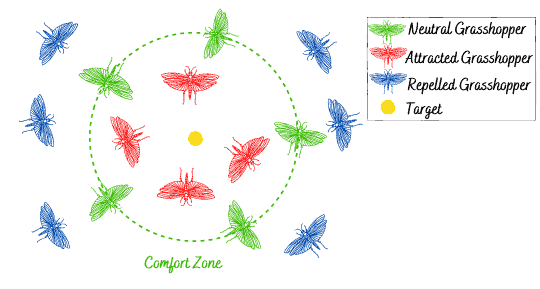
当蝗虫之间距离在 [0, 2.079] 范围内时,表现为排斥力;在 2.079 处为舒适区;超过 2.079 后表现为吸引力。
4.2 重力力
重力作用方向朝向地球中心:
(5)
$$
G_i = -g \hat{e_g}
$$
其中 $ g $ 是重力常数,$ \hat{e_g} $ 是单位向量。
4.3 风向力
风向对蝗虫的移动有显著影响,特别是在成虫阶段:
(6)
$$
A_i = u \hat{e_w}
$$
其中 $ u $ 是风漂移常数,$ \hat{e_w} $ 是风向单位向量。
4.4 蝗虫位置更新公式
综合以上三种力,最终的蝗虫位置更新公式如下:
(7)
$$
X_i = \sum_{j=1}^{N} s(|x_j - x_i|) \frac{x_j - x_i}{d_{ij}} - g \hat{e_g} + u \hat{e_w}, \quad i \neq j
$$
为了防止蝗虫过早陷入局部最优,GOA 引入了一个衰减系数 $ c $ 来动态调整社交互动的范围:
(8)
$$
X_i^d = c \left( \sum_{j=1}^{N} \frac{UB_d - LB_d}{2} s(|x_j^d - x_i^d|) \frac{x_j - x_i}{d_{ij}} \right) + \text{Best Solution}
$$
其中 $ c $ 是一个随迭代次数递减的系数:
(9)
$$
c = c_{max} - iter \cdot \frac{c_{max} - c_{min}}{Max_{iter}}
$$
5. GOA 算法步骤
以下是 GOA 算法的伪代码实现:
algorithm GrasshopperOptimizer(iter, c_max, c_min, l, f, n, Max_iter):
// 参数说明:
// c_max, c_min:c 的最大最小值
// l:吸引力长度尺度
// f:吸引力强度
// n:蝗虫数量
// Max_iter:最大迭代次数
// 初始化蝗虫种群
grasshoppers = initialize n solutions (X_1, X_2, ..., X_n)
// 计算适应度
Compute fitness for each grasshopper
// 找出当前最优解
bestSolution = findBest(grasshoppers)
iter = 0
while iter < Max_iter:
update c using equation (9)
for grasshopper in grasshoppers:
normalize distance between [1, 4]
update position using equation (8)
check boundaries
update bestSolution if found better one
iter += 1
return bestSolution
时间复杂度分析
GOA 的时间复杂度主要取决于种群数量和迭代次数:
$$ O(n \times Max_{iter}) $$
6. 数值示例
我们通过一个简单的优化问题来演示 GOA 的执行过程。
6.1 初始化参数
我们设定如下参数:
| 参数 | 值 | 说明 |
|---|---|---|
| Max_iter | 9 | 最大迭代次数 |
| c_max | 1 | c 的最大值 |
| c_min | 0.00004 | c 的最小值 |
| LB | -5 | 下界 |
| UB | 5 | 上界 |
| d | 2 | 维度 |
初始化蝗虫种群:
| 序号 | X(1) | X(2) |
|---|---|---|
| 1 | 3.1472 | 1.3236 |
| 2 | 4.0579 | -4.0246 |
| 3 | -3.7301 | -2.2150 |
| 4 | 4.1338 | 0.4688 |
6.2 计算适应度值
我们使用如下适应度函数:
$$ Fitness = 4x_1^2 - 2.1x_1^4 + \frac{1}{3}x_1^6 + x_1x_2 - 4x_2^2 + 4x_2^4 $$
计算结果如下:
| 序号 | X(1) | X(2) | Fitness |
|---|---|---|---|
| 1 | 3.1472 | 1.3236 | 166.9550 |
| 2 | 4.0579 | -4.0246 | 1953.1 |
| 3 | -3.7301 | -2.2150 | 631.9194 |
| 4 | 4.1338 | 0.4688 | 1119.6 |
当前最优解为 166.9550。
6.3 归一化距离
根据公式 (10) 和 (11):
$$ c = 1 - 2 \cdot \frac{1 - 0.00004}{9} \approx 0.80001 $$
计算各蝗虫之间的归一化距离:
| 序号 | Distance(1) | Distance(2) |
|---|---|---|
| 1 | 0.0058 | -0.1533 |
| 2 | -0.0756 | 0.13648 |
| 3 | 0.1565 | -0.0275 |
| 4 | -0.0867 | -0.0106 |
6.4 更新位置
根据公式 (8) 更新各蝗虫的新位置:
| 序号 | X(1) | X(2) |
|---|---|---|
| 1 | 3.1519 | 1.2009 |
| 2 | 3.0867 | 1.4328 |
| 3 | 3.1472 | 1.3236 |
| 4 | 3.0778 | 1.3151 |
6.5 重新计算适应度
更新后计算新的适应度值:
| 序号 | Fitness |
|---|---|
| 1 | 165.6341 |
| 2 | 148.8582 |
| 3 | 221.6412 |
| 4 | 141.9027 |
发现最优解更新为 141.9027。
6.6 全局最优解更新
继续迭代,直到达到最大迭代次数。最终得到最优解为:
$$ \text{Best Global Solution} = 124.3374 $$
7. GOA 的优缺点
| 优点 ✅ | 缺点 ❌ |
|---|---|
| 能有效解决无约束和有约束的全局优化问题 | 易陷入局部最优 |
| 实现简单 | 收敛速度较慢 |
| 精度高 | 对参数敏感 |
| 能找到高质量解 | 初始种群影响大 |
8. 总结
GOA 是一种基于蝗虫群体行为的新型元启发式优化算法,具有良好的全局搜索能力。通过模拟蝗虫的社交行为、风向影响和重力作用,GOA 在复杂优化问题中表现出了不错的性能。
虽然它在某些场景下存在收敛速度慢和易陷入局部最优的问题,但通过参数调整和改进策略,可以在一定程度上缓解这些问题。
✅ 建议:对于需要高精度、全局搜索能力强的优化任务,GOA 是一个值得尝试的算法。
⚠️ 注意:在实际使用中,需结合问题特点合理设置参数,并考虑引入局部搜索机制以提高收敛速度。