1. 引言
在操作系统中,进程同步(Process Synchronization)指的是在并发环境下对线程或进程进行协调,以避免竞态条件(Race Condition)和死锁(Deadlock)。
本文将对比两种常用的同步机制:Spinlock(自旋锁)和Semaphore(信号量)。它们都能用于进程或线程间的同步,但适用场景和实现机制差异明显。
2. 同步机制概述
我们先来简单回顾几个关键概念:
- 锁(Lock):用于阻止其他线程访问某些资源。只有持有锁的线程才能访问资源,其他线程必须等待。
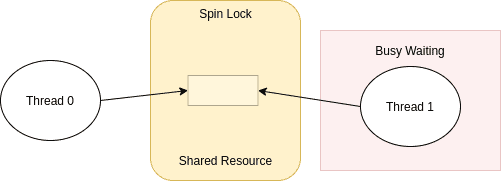
- 自旋锁(Spinlock):通过忙等待(Busy Waiting)实现同步。线程在等待锁释放时不断循环检查,期间不执行任何实际任务。
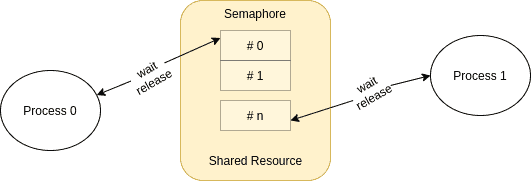
- 信号量(Semaphore):一种不依赖忙等待的同步机制,本质上是一个被多个进程共享的整型变量。它有两个基本操作:
wait()和signal(),用于控制对资源的访问。
2.1 Spinlock 示意图
2.2 Semaphore 示意图
2.3 其他相关概念
- 二值信号量(Binary Semaphore):只能取 0 或 1,用于实现互斥访问。
- 计数信号量(Counting Semaphore):允许任意正整数值,用于控制多个并发访问。
- 互斥锁(Mutex):与信号量不同,它是一种锁机制,强调“所有权”概念,而信号量更偏向于“信号通知”。
3. Spinlock vs. Semaphore 对比分析
✅ Spinlock 的特点
- 线程在等待锁时会忙等待(busy-wait),即不断循环检查锁是否释放。
- 实现简单,适用于锁持有时间极短的场景。
- 在等待期间不释放 CPU,容易浪费系统资源。
- 在单核系统中,如果线程忙等待,CPU 将无法被其他线程利用,造成资源浪费。
- 通常需要关闭中断和禁止抢占(preemption)以防止死锁或资源竞争。
✅ Semaphore 的特点
- 不使用忙等待,线程在等待资源时会被挂起(sleep)。
- 使用
wait()和signal()操作控制资源访问。 - 更节省资源,适合长时间等待的场景。
- 可以用于控制多个并发访问(计数信号量)。
- 不需要关闭中断或禁止抢占。
⚠️ 使用场景对比
| 场景 | 推荐机制 |
|---|---|
| 锁持有时间短 | Spinlock |
| 锁持有时间长 | Semaphore |
| 多线程并发访问资源 | Semaphore |
| 内核中断处理中 | Spinlock(因为不能 sleep) |
| 需要禁止抢占 | Spinlock |
| 需要高效资源利用 | Semaphore |
4. 总结对比表
| 特性 | Spinlock | Semaphore |
|---|---|---|
| 同步机制 | 简单 | 复杂 |
| 等待方式 | 忙等待(Busy Wait) | 挂起等待(Sleep) |
| 资源消耗 | 高(浪费 CPU) | 低(不浪费资源) |
| 适用场景 | 短时间持有锁 | 长时间持有锁 |
| 支持并发数 | 仅 1 个 | 可支持多个 |
| 是否允许睡眠 | ❌ 不允许 | ✅ 允许 |
| 是否可用于中断 | ✅ | ❌ |
| 是否需要关闭中断 | ✅ | ❌ |
| 是否允许抢占 | ❌ | ✅ |
5. 总结
Spinlock 和 Semaphore 是两种典型的同步机制,各有优劣:
- Spinlock 是一种低级别的同步机制,实现简单、响应快,但容易浪费 CPU 资源,适用于锁持有时间极短、中断处理等场景。
- Semaphore 是更高级的同步机制,效率更高,适用于长时间等待和多并发访问,但使用不当可能引发死锁。
选择哪种机制,取决于具体的应用场景和性能需求。在实际开发中,合理使用这两种机制可以显著提升系统并发性能和稳定性。
✅ 建议:
- 内核级开发中,常使用 Spinlock 来避免调度开销;
- 应用层开发中,优先考虑使用 Semaphore 或更高层次的同步工具如
ReentrantLock、CountDownLatch等。