1. 引言
本文将探讨使用 Java 实现迷宫导航的多种方案。我们将迷宫视为黑白图像:黑色像素代表墙壁,白色像素代表路径。其中有两个特殊的白色像素——入口和出口。给定这样的迷宫,我们的目标是从入口找到一条通往出口的路径。
2. 迷宫建模
我们将迷宫表示为二维整数数组,数值含义约定如下:
- 0 → 道路
- 1 → 墙壁
- 2 → 迷宫入口
- 3 → 迷宫出口
- 4 → 路径中的节点
将迷宫建模为图结构:入口和出口是两个特殊节点,我们需要找到它们之间的路径。图包含节点和边,边定义了节点间的连接关系。因此我们假设每个节点有四个隐式边,分别连接其左、右、上、下四个相邻节点。
方法签名定义:
public List<Coordinate> solve(Maze maze) {
}
输入参数 maze 包含符合上述约定的二维数组,返回值是从入口到出口的路径节点列表。
3. 递归回溯算法(DFS)
3.1 算法原理
最直观的方案是暴力搜索所有可能路径,但这种方法时间复杂度呈指数级增长,无法扩展到大型迷宫。不过我们可以通过回溯和标记已访问节点来优化暴力搜索,这种算法也称为深度优先搜索。
算法步骤:
- 如果当前节点是墙壁或已访问节点 → 返回失败
- 如果当前节点是出口 → 返回成功
- 否则:
- 将节点加入路径列表
- 递归探索四个方向
- 若所有方向均失败,则从路径中移除当前节点并返回失败
- 当找到出口时,路径列表即为有效路径
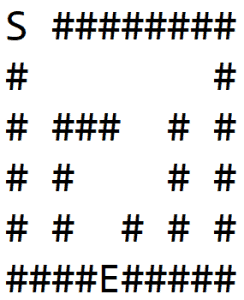
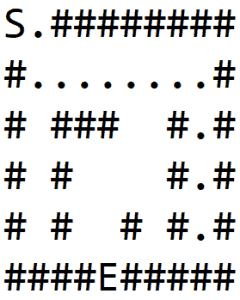
以图1(a)的迷宫为例(S=起点,E=出口),按右→下→左→上的顺序探索:
- 图1(b):探索路径遇到墙壁,回溯到有未探索邻居的节点
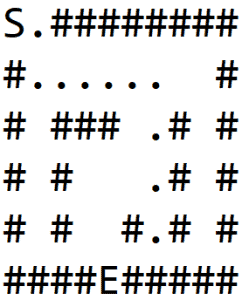
- 图1(c):探索新路径再次遇到墙壁
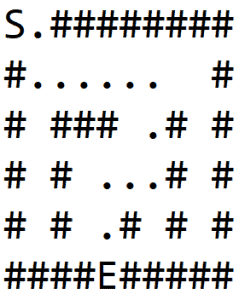
- 图1(d):重复回溯过程最终找到出口
3.2 代码实现
首先定义四个移动方向(坐标偏移量):
private static int[][] DIRECTIONS
= { { 0, 1 }, { 1, 0 }, { 0, -1 }, { -1, 0 } };
坐标相加工具方法:
private Coordinate getNextCoordinate(
int row, int col, int i, int j) {
return new Coordinate(row + i, col + j);
}
核心求解方法:逻辑简单粗暴——存在路径则返回路径,否则返回空列表
public List<Coordinate> solve(Maze maze) {
List<Coordinate> path = new ArrayList<>();
if (
explore(
maze,
maze.getEntry().getX(),
maze.getEntry().getY(),
path
)
) {
return path;
}
return Collections.emptyList();
}
递归探索方法 explore 分三块处理:
- 无效节点处理:超出边界/墙壁/已访问节点 → 返回失败
- 节点标记:将当前节点加入路径并标记为已访问
- 递归探索:若未找到出口,则按顺序探索四个方向
private boolean explore(
Maze maze, int row, int col, List<Coordinate> path) {
if (
!maze.isValidLocation(row, col)
|| maze.isWall(row, col)
|| maze.isExplored(row, col)
) {
return false;
}
path.add(new Coordinate(row, col));
maze.setVisited(row, col, true);
if (maze.isExit(row, col)) {
return true;
}
for (int[] direction : DIRECTIONS) {
Coordinate coordinate = getNextCoordinate(
row, col, direction[0], direction[1]);
if (
explore(
maze,
coordinate.getX(),
coordinate.getY(),
path
)
) {
return true;
}
}
path.remove(path.size() - 1);
return false;
}
⚠️ 此方案栈空间消耗与迷宫大小成正比,深度过大的迷宫可能导致栈溢出。
4. 变体:最短路径(BFS)
4.1 算法原理
DFS 找到的路径不一定是最短的。要找到最短路径,可使用广度优先搜索。
核心差异:
- DFS:优先探索单个子节点及其所有后代
- BFS:优先探索所有直接子节点,再处理孙节点
算法步骤:
- 将起点加入队列
- 循环处理队列直到为空:
- 跳过墙壁/已访问节点
- 遇到出口时回溯父节点构建路径
- 否则将四个方向的邻居加入队列
关键点:节点必须记录父节点来源,以便找到出口时回溯路径。下图展示了 BFS 的逐层探索过程:
4.2 代码实现
复用 DIRECTIONS 定义。先实现路径回溯工具方法:
private List<Coordinate> backtrackPath(
Coordinate cur) {
List<Coordinate> path = new ArrayList<>();
Coordinate iter = cur;
while (iter != null) {
path.add(iter);
iter = iter.parent;
}
return path;
}
核心求解方法(使用队列替代递归):
public List<Coordinate> solve(Maze maze) {
LinkedList<Coordinate> nextToVisit
= new LinkedList<>();
Coordinate start = maze.getEntry();
nextToVisit.add(start);
while (!nextToVisit.isEmpty()) {
Coordinate cur = nextToVisit.remove();
if (!maze.isValidLocation(cur.getX(), cur.getY())
|| maze.isExplored(cur.getX(), cur.getY())
) {
continue;
}
if (maze.isWall(cur.getX(), cur.getY())) {
maze.setVisited(cur.getX(), cur.getY(), true);
continue;
}
if (maze.isExit(cur.getX(), cur.getY())) {
return backtrackPath(cur);
}
for (int[] direction : DIRECTIONS) {
Coordinate coordinate
= new Coordinate(
cur.getX() + direction[0],
cur.getY() + direction[1],
cur
);
nextToVisit.add(coordinate);
maze.setVisited(cur.getX(), cur.getY(), true);
}
}
return Collections.emptyList();
}
✅ BFS 保证找到最短路径,但内存消耗高于 DFS(需存储所有待访问节点)。
5. 总结
本文介绍了两种图算法解决迷宫问题:
- 深度优先搜索(DFS):实现简单,但路径不一定最短
- 广度优先搜索(BFS):保证最短路径,但内存开销更大
进阶学习建议:研究 A* 和 Dijkstra 算法等更高效的路径规划方案。
完整代码可在 GitHub 获取。