1. 简介
在软件开发中,我们经常需要在图中找到两个点之间的最优路径。这种需求在很多场景中都会出现,比如游戏中的寻路、地图类软件(如 Google Maps)的路线规划,以及其他各种需要路径计算的系统中。
Dijkstra 算法 是一种非常流行的最短路径查找算法,广泛用于图结构中两点之间的最短路径计算。
2. 什么是路径查找(Pathfinding)
路径查找是一种图遍历算法,用于从起点到终点之间找出最优路径。这里的“最优”可以是步数最少,也可以是每一步的“代价”总和最小。
路径代价取决于图的类型。例如在现实地图中,代价可能是距离(米),而在游戏如 Civilization 中,代价可能根据单位类型和地形类型来决定。
路径查找还被用于状态机的遍历,图中的每个节点代表一个状态,边代表状态之间的转换。比如解决 魔方 问题时,就可以用路径查找找出最短的状态转换路径。
3. Dijkstra 算法原理
Dijkstra 算法是一种贪心算法,它会从起点开始,逐步探索所有可达路径,并记录到达每个节点的最短代价,最终找到通往目标节点的最短路径。
算法核心思想是:
- 为每个节点维护一个“当前最短距离”
- 每次选取当前未访问节点中距离最短的节点,作为当前节点
- 遍历该节点的所有邻居,尝试更新它们的最短距离
- 直到目标节点被访问或所有可达节点都已处理完毕
3.1 流程图
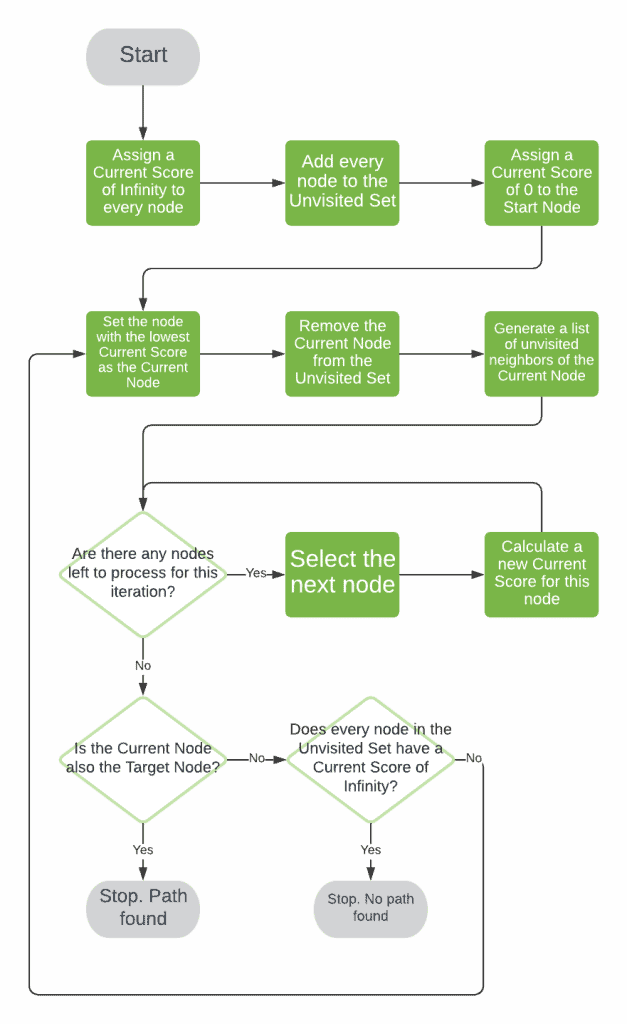
3.2 伪代码详解
主算法逻辑
algorithm Dijkstra(graph, startNode, targetNode):
// INPUT
// graph, startNode, targetNode
// OUTPUT
// 从 startNode 到 targetNode 的最短路径
for each node in graph:
node.score <- infinity
node.visited <- false
startNode.score <- 0
while true:
currentNode <- nodeWithLowestScore(graph)
currentNode.visited <- true
for nextNode in currentNode.neighbors:
if nextNode.visited = false:
newScore <- calculateScore(currentNode, nextNode)
if newScore < nextNode.score:
nextNode.score <- newScore
nextNode.routeToNode <- currentNode
if currentNode = targetNode:
return buildPath(targetNode)
if nodeWithLowestScore(graph).score = infinity:
throw a NoPathFound exception
辅助函数 1:找出当前得分最低(最短路径)的未访问节点
algorithm nodeWithLowestScore(graph):
// INPUT
// graph = 输入图
// OUTPUT
// 未访问且得分最低的节点
result <- null
for each node in graph:
if node.visited = false and (result is null or node.score < result.score):
result <- node
return result
辅助函数 2:计算新路径得分
algorithm calculateScore(currentNode, nextNode):
// INPUT
// currentNode, nextNode
// OUTPUT
// 从 currentNode 到 nextNode 的新得分
return currentNode.score + currentNode.edgeCost(nextNode)
辅助函数 3:构建最终路径
algorithm buildPath(targetNode):
// INPUT
// targetNode
// OUTPUT
// 从起点到终点的路径节点列表
route <- create an empty list
currentNode <- targetNode
while currentNode != null:
route.add(currentNode)
currentNode <- currentNode.routeToNode
return route
💡 小贴士:
- Dijkstra 适合无负权边的图结构
- 如果图中存在负权边,应使用 Bellman-Ford 算法
- 若图是网格结构(如地图),可以考虑 A* 算法,效率更高
4. 总结
我们介绍了路径查找的基本概念,以及 Dijkstra 算法的核心思想和实现逻辑。该算法虽然简单,但非常实用,是图遍历中最基础也是最重要的算法之一。
✅ 适用场景:
- 路径规划(地图导航)
- 网络路由
- 游戏 AI 寻路
- 状态机路径查找
❌ 不适用场景:
- 图中存在负权边
- 实时性要求极高,需要更快的启发式算法
⚠️ 踩坑提醒:
- 初始化所有节点得分时,务必设为无穷大(可模拟为一个极大值)
- 访问过的节点不能再参与后续计算,否则可能陷入死循环
- 构建路径时要记得反转顺序,因为是从终点回溯到起点
掌握 Dijkstra 算法后,你可以在此基础上尝试实现更高效的 A* 算法,或结合实际场景进行优化。