1. 简介
本文将介绍两个主要用于目标检测的计算机视觉算法,重点探讨它们的实现机制与应用场景。我们将深入对比 R-CNN 与 Fast R-CNN 的架构差异,重点解析 Fast R-CNN 中的 RoI(Region of Interest)池化层。两者的核心目标都是通过生成边界框(bounding box)来识别和分类图像中的物体。
2. R-CNN 架构概述
R-CNN 的架构如下图所示:
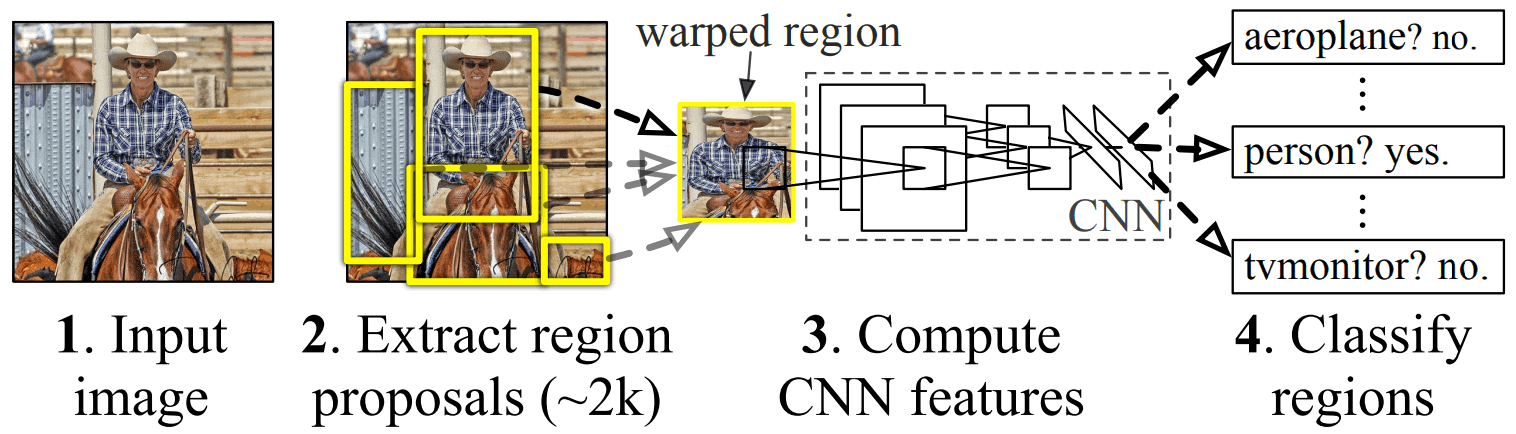
R-CNN 最早由 Ross Girshick 于 2014 年提出。其整体流程分为三步:
- 使用 Selective Search 提取约 2000 个候选区域(Region Proposals);
- 对每个候选区域使用 CNN 提取特征;
- 使用线性 SVM 对每个区域进行分类与定位。
输入图像通过 Selective Search 算法生成约 2000 个候选区域,每个区域大小为 227x227 像素。然后,每个候选区域都通过 CNN 提取特征,最后使用 SVM 判断是否包含物体并进行分类。
2.1. R-CNN 的局限性
虽然 R-CNN 精度尚可,但存在几个显著问题:
- 每张图像固定生成 2000 个候选区域,无法扩展;
- 每个候选区域都要单独过一次 CNN,训练和推理效率极低;
- Selective Search 是无监督方法,区域质量影响模型精度;
- SVM 分类器与 CNN 特征提取是分离的,模型训练不够统一。
这些问题促使了 Fast R-CNN 的诞生。
3. Fast R-CNN 架构改进
Fast R-CNN 的架构如下图所示:
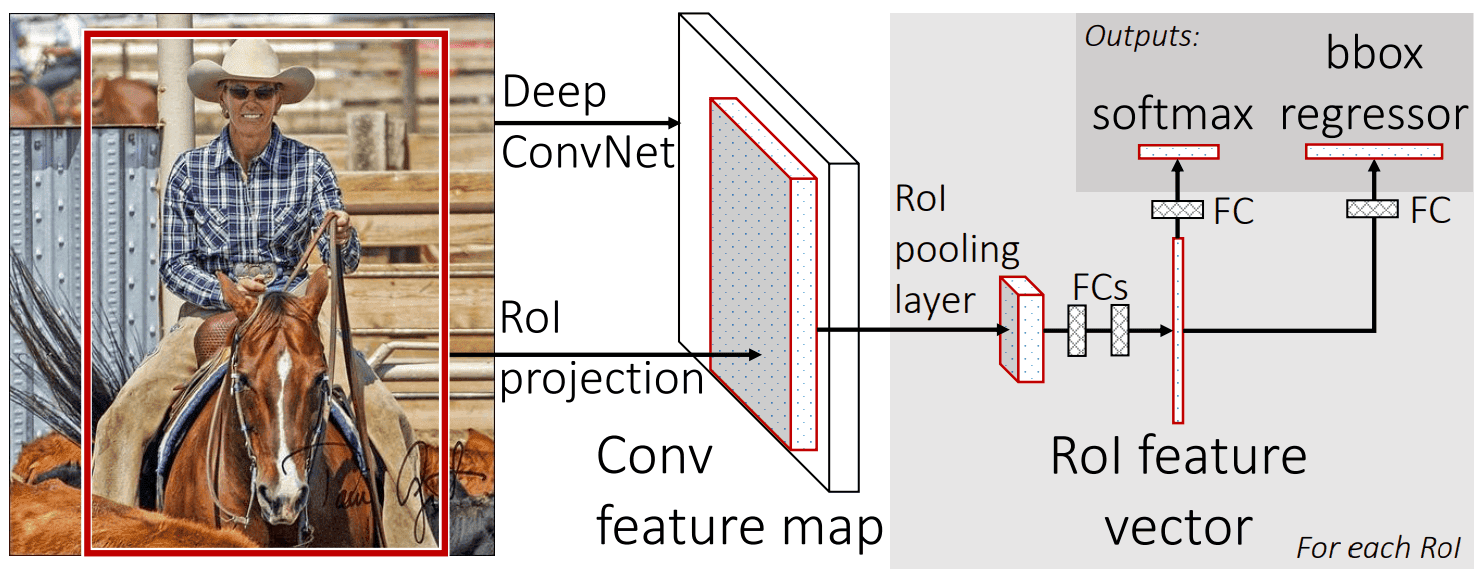
Fast R-CNN 由 Ross Girshick 于 2015 年提出,其核心改进在于:
- 整张图像只经过一次 CNN 提取特征;
- 所有候选区域共享该特征图;
- 使用 RoI Pooling 层将不同大小的候选区域统一为固定大小;
- 使用全连接层 + softmax 分类器 + 回归器,统一训练流程。
Fast R-CNN 的处理流程如下:
- 输入整张图像;
- CNN 生成整图的特征图(feature map);
- Region Proposal 方法(如 Selective Search)提供候选区域;
- RoI Pooling 层将每个候选区域映射为固定大小;
- 全连接层输出 softmax 概率 和 bounding box 回归偏移量。
3.1. Fast R-CNN 的优势
Fast R-CNN 相比 R-CNN 的主要优势包括:
✅ 特征共享:整图只过一次 CNN,大大减少计算量
✅ 统一训练:分类与回归任务共享 CNN 特征
✅ 端到端优化:整个网络可以联合训练,提升精度
4. RoI Pooling 层详解
RoI Pooling 是 Fast R-CNN 的核心创新之一,其作用是将任意大小的候选区域统一为固定大小的特征向量,以便后续输入全连接层处理。
4.1. RoI Pooling 的工作原理
一个 RoI 通常由 (r, c) 表示左上角坐标,(h, w) 表示高度和宽度。RoI Pooling 的步骤如下:
- 将 RoI 对应的特征图区域划分为
H x W的子区域(例如 7x7); - 每个子区域使用 Max Pooling 提取最大值;
- 最终输出一个固定大小的特征向量(如 7x7x512)。
这种机制使得 Fast R-CNN 能够处理任意大小的 RoI,打破了传统 CNN 输入尺寸固定的限制。
4.2. 示例代码
以下是一个简化的 RoI Pooling 实现示例(伪代码):
def roi_pooling(feature_map, rois, output_size=(7, 7)):
pooled_features = []
for roi in rois:
x, y, w, h = roi
# 在 feature_map 上截取对应区域
roi_feature = feature_map[y:y+h, x:x+w]
# 使用 max pooling 调整到 output_size
pooled = max_pool(roi_feature, output_size)
pooled_features.append(pooled)
return np.array(pooled_features)
4.3. RoI Pooling 的意义
RoI Pooling 的引入解决了以下问题:
- ✅ 支持任意大小的 RoI 输入
- ✅ 提高了训练和推理效率
- ✅ 为后续 Faster R-CNN 中的 RoI Align 打下基础
⚠️ 但 RoI Pooling 也存在量化误差问题,这在 Faster R-CNN 中通过 RoI Align 得到改进。
5. 应用场景
Fast R-CNN 可用于多种目标检测任务,包括但不限于:
- 🚗 自动驾驶:识别车辆、行人、交通标志
- 🏥 医疗影像:肿瘤检测、病灶识别
- 🌾 农业监控:作物识别、虫害检测
- 👁️🗨️ 智能安防:人脸检测、异常行为识别
6. 总结
本文回顾了 R-CNN 与 Fast R-CNN 的架构差异,重点解析了 Fast R-CNN 中 RoI Pooling 的原理与作用。Fast R-CNN 通过特征共享和 RoI Pooling 极大地提升了目标检测的速度与精度,是目标检测领域的重要里程碑。
后续的 Faster R-CNN 更是在此基础上引入了 Region Proposal Network(RPN),实现了完全端到端的目标检测流程。Fast R-CNN 的 RoI Pooling 思想也为后续的 RoI Align、RoI Transformer 等方法提供了启发。